
اگر به یک وب سایت یا فروشگاه رایگان با فضای نامحدود و امکانات فراوان نیاز دارید بی درنگ دکمه زیر را کلیک نمایید.
ایجاد وب سایت یا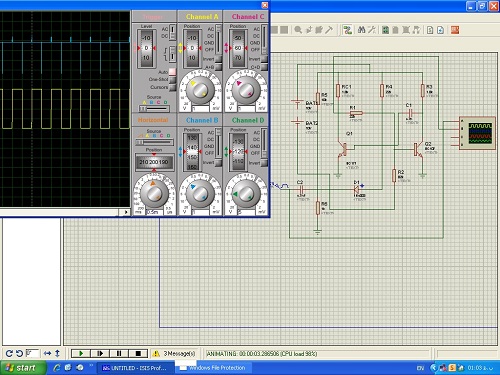 ازمایشگاه تکنیک پالس شبیهسازی با proteus
ازمایشگاه تکنیک پالس شبیهسازی با proteus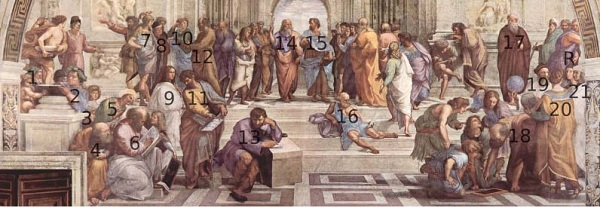 تجزیه و تحلیل نقاشی مدرسه آتن
تجزیه و تحلیل نقاشی مدرسه آتن مقاله مدیریت سازمان های ورزشی
مقاله مدیریت سازمان های ورزشی كاربرد استخراج با سيال فوق بحراني در صنايع غذايي
كاربرد استخراج با سيال فوق بحراني در صنايع غذايي روش های نوین تجارت و تجارت الکترونیکی فرش دستباف
روش های نوین تجارت و تجارت الکترونیکی فرش دستباف تحقیق درباره ی Access
تحقیق درباره ی Access تحقیق كارشناسي ارشد عوامل موثر در روسپي گري فحشا
تحقیق كارشناسي ارشد عوامل موثر در روسپي گري فحشا هنر و گرافیک
هنر و گرافیک بررسی و طراحی نرم افزار حسابداری و مالی
بررسی و طراحی نرم افزار حسابداری و مالی تحقیق درباره ی هیدروژناسیون
تحقیق درباره ی هیدروژناسیون نقش و کاربرد انرژی هسته ای در کشاورزی
نقش و کاربرد انرژی هسته ای در کشاورزی تحقیق تنظيم كننده هاي رشد گياهي (هورمونهاي گياهي)
تحقیق تنظيم كننده هاي رشد گياهي (هورمونهاي گياهي) فروش فیلتر بورسی استریکلی فقط 75 هزار تومان
فروش فیلتر بورسی استریکلی فقط 75 هزار تومان کسب درآمد اینترنتی 300000 تومان در خانه در کمتر از 30 دقیقه
کسب درآمد اینترنتی 300000 تومان در خانه در کمتر از 30 دقیقه کسب درآمد روزانه حداقل یک میلیون تومان ! کاملا حلال و واقعـی !!
کسب درآمد روزانه حداقل یک میلیون تومان ! کاملا حلال و واقعـی !! مجموعه ی آموزش تعمیر لامپ کم مصرف (از مبتدی تا پیشرفته)
مجموعه ی آموزش تعمیر لامپ کم مصرف (از مبتدی تا پیشرفته) دانلود پکیج درآمدزایی 400هزارتومن در 40دقیقه (مخصوص شرایط تورم 50 درصدی)
دانلود پکیج درآمدزایی 400هزارتومن در 40دقیقه (مخصوص شرایط تورم 50 درصدی) کسب و کار اینترنتی در منزل
کسب و کار اینترنتی در منزل آموزش برنامه نویسی آردوینو
آموزش برنامه نویسی آردوینو آموزش رایگان کسب درآمد از سایت الیمپ ترید ( olymp trade )
آموزش رایگان کسب درآمد از سایت الیمپ ترید ( olymp trade ) دانلود نمونه فاکتور آماده با فرمت ورد - اکسل و عکس
دانلود نمونه فاکتور آماده با فرمت ورد - اکسل و عکس آموزش ساخت بازی بدون دانش برنامه نویسی و طراحی سه بعدی مبتدی تا پیشرفته با نرم افزار
آموزش ساخت بازی بدون دانش برنامه نویسی و طراحی سه بعدی مبتدی تا پیشرفته با نرم افزار اموزش کسب درامد از اینترنت روزانه ۳میلیون تومان تضمینی و تست شده
اموزش کسب درامد از اینترنت روزانه ۳میلیون تومان تضمینی و تست شده درامدزایی در خواب! (تعجب نکنید! بخوانید)
درامدزایی در خواب! (تعجب نکنید! بخوانید) مدار داخلی واکی تاکی(اموزش ساخت)
مدار داخلی واکی تاکی(اموزش ساخت) کتاب افزایش ممبر کانال تلگرام
کتاب افزایش ممبر کانال تلگرام دانلود100% رایگان نرم افزار تبلیغات در تلگرام + آموزش کامل و فیلم آموزشی
دانلود100% رایگان نرم افزار تبلیغات در تلگرام + آموزش کامل و فیلم آموزشی
چکیده طرح پژوهشی :
ربات I.R.M یک نمونه از رباتهای متحرک هوشمند است . در این ربات هدف اصلی ، انجام عمل پردازش تصویر با سرعت ، دقت و کیفیت بالا بر روی یک بدنه متحرک می باشد . فرآیند پردازش تصویر یک اصل اساسی در علم هوش مصنوعی ( هوش ماشینی ) و رباتیک است که پیشرفت این علوم وابسته به پیشرفت علم پردازش تصویر ( Image processing ) می باشند ، این عمل در این ربات بدین صورت است که تصاویر محیط اطراف توسط دوربین دریافت و به کامپیوتر ارسال و توسط نرم افزار فیلتر می شوند ، سپس عمل اسکن و پردازش آنها با نرم افزار نوشته شده صورت می گیرد و تصمیمات لازم با استفاده از نتایج این پردازش ها جهت کنترل ربات به برد کنترل که در روی ربات قرار دارد ارسال می شوند ، درشت فرمانهای ارسالی از سوی کامپیوتر را میکرو کنترلر دریافت کرده و پس از آنالیز آنها به قسمتهای مورد نظر اعمال می دارد . ربات I.R.M علاوه بر مشخصه پردازش تصویر، دارای یک سیستم مکانیکی جدید با امکانات زیاد و انعطاف بالا ، برای کار در محیطهای مختلف و سازگاری با شرایط مختلف می باشد . در تنه فیزیکی سیستم از 6 عدد Stepper Motor و 3 عدد DC Motor کوچک با بهره بهینه ، صفحات آلومنیومی برای ساخت کف ربات و قوطیهای آلومنیومی برای بازوها و آلات متحرک ربات ، تسمه ها و چرخ دنده ها و قطعات پلاستیکی و ..... ، استفاده شده است . ربات با پورتهای سریال و TV کارت کامپیوتر با سیم در ارتباط است ، منبع تغذیه نیز در بیرون قرار دارد و با سیم ربات را تغذیه می کند . ارتفاع فیزیکی ربات در حالت عادی و موقعی که حرکت می کند 75 Cm و محدوده مانور پنجه از 12- تا 95+ Cm می باشد و در حالت توقف از شعاع 0تا 55 cm از محیط را در دسترس خود دارد . وزن تقریبی ربات 5/0±7 کیلوگرم می باشد . دارای 4 چرخ که دوعدد آن بزرگ ( کوپل به موتورها ) در طرفینو دو عدد دیگر ، کوچک ( هرز گرد ) در جلو و عقب ربات ، می باشد.
ولتاژ کار ربات از یک منبع تغذیه با خروجیهای 12 ولت1 و 3 آمپری و 5 ولت منطقی تامین می شود که همه ولتاژهای مورد نیاز از یک منبع تغذیه دیجیتالی ( موجود در آزمایشگاههای برق ) قابل تامین است .
هدف از اجرای این طرح :
در کل اهدفی که از اجرای این طرح دنبال می شد :
1- ایجاد یک مسیر تجربی رباتیک برای دانشجویان مستعد در این زمینه .
2- کسب تجارب و ثبت و مکتوب نمودن آنها برای تحقیقات بعدی در زمینه رباتیک .
3- فراهم نمودن فرصتی برای عینیت بخشیدن به خلاقیتهای دانشجویان .
4- برداشتن گامی از سوی این واحد به سمت علم رباتیک و بیان توان خود دراین زمینه .
و در نهایت در کشوری مثل ایران که در این زمینه حرفی برای گفتن در دنیای این علم دارد به طوری که در سالهای اخیر شاهد موفقیتهای چشمگیر تیمهای دانشگاهی در مسابقات بین المللی هستیم ، اجرای پروژه های اینچنینی موجب رشد و ترقیب هر چه بیشتر گروهای فعال در این زمینه می باشد .
طراحی اولیه :
برای شروع نیاز به یک زمینه اولیه بود که باید آن بوجود می آمد برای همین یک فراخوان عمومی برای دادن طرح اولیه یک ربات انجام شد پس از مطالعه و بررسی دقیق از میان بیش از 60 طرح مختلف که هر کدام فقط در حد یک شکل ظاهری و تواناییهای مربوطه بودند ، با توجه به ویژگیها و توانائیهایشان 3 طرح به عنوان طرح مناسب برای اجرا انتخاب شد که پس از یک بررسی کارشناسانه و تطابق آن با تمام شرایط موجود یک طرح انتخاب شد . این طرح نیز نیازمند تغیرات جزئی برای انجام بود که تغیرات لازم بر روی آن صورت گرفته و طرح آماده برای اجرای عملی ، گشت . ملاکهای انتخاب طرح از این قرار بودند :
1- بتوان طرح را با امکانات موجود در واحد و با هزینه اندک ساخت.
2- ساخت و تکمیل آن در کوتاه مدت میسر باشد .
3- قابلیت ارتقاء داشته و در محیطهاهی مختلف توانایی کار داشته باشد .
4- دارای مکانیزمی جدید و ابتکاری باشد .
طراحی جزء به جزء طرح :
پس از انتخاب یک طرح کلی ، باید اجزای فیزیکی آن بر اساس نحوه کار و وظایف آن طراحی می شد . برای این کار ، لیستی از کارهایی که ربات مورد نظر باید انجام می داد به شرح زیر تهیه گشت :
1- حرکت کردن به جلو و عقب
2- دور زدن در یک نقطه ثابت
3- حرکت دادن کل بازو در تمام نقاط محیط خود در شعاع کاری
4- جلو و عقب بردن دست و متعلقات ربات در جهت افقی
5- بالا و پائین بردن دست و متعلقات در جهت عمودی
6- چرخاندن دست حول محور عمودی و افقی ، جهت برداشتن اشیاء با موقعیتها و اشکال مختلف
7- باز و بستن پنجه و چرخاندن 360 درجه آن به تعداد دور نامحدود جهت پیچاندن و یا بستن اشیاء و ملزومات مورد نظر و .....
در کل بر روی این ربات 9 قسمت متحرک مجزا از هم وجود دارد که باید برای هر کدام یک موتور و راه انداز جداگانه در نظر گرفته شود در ضمن حرکت این ربات باید بسیار دقیق باشد چون برای این ربات توان انجام کارهای ریز نیز در نظر گرفته شده است بنابراین باید موتورها و درایورهای بکار رفته در این بسیار دقیق باشند ، برای تعیین موتورهای این ربات مطالعه و بررسی کامل بعمل آمد و تصمیم بر آن شد که 6 بخش از آلات متحرک ربات بایستی باSTEPPER موتور و 3 بخش دیگر با DC موتور راه اندازی شوند . برای اینکه ربات در مقیاس اندازه اش وزن سبک و در عین حال مستحکم می داشت ، بدنه ربات را از جنس آلومنیوم انتخاب شد البته انعطاف و شکل پذیری آلومنیوم ، برای ساخت اینگونه دستگاهها قابل اغماض نیست . محور های انتقال نیرو هم بایستی حداقل تلفات انرژی محرکها را داشته باشند که این کار با استفاده از بلبرینگ و بوش عملی می باشد .
مبلغ قابل پرداخت 28,000 تومان





